
千万建筑资料下载 →
机械手运动仿真实验报告
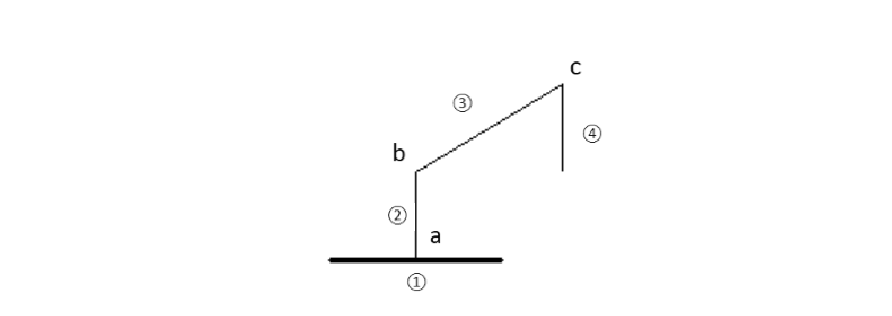
一、 机械手结构组成(简图)
① 为机械手底座 ②为机械臂1
③为机械臂2④为机械臂3
a、b、c为转动副,机械臂实现3自由度运动
二、 机械手运动学方程推导
绘图框及转动副夹角:
绘图框大小为400X400
转动副a:anglea
转动副b:angleb
转动副c:anglec
机械手运动范围:
机械臂1长度50,机械臂2长度100,机械臂3长度50。三个关节可实现360度旋转。故机械臂运动范围为以半径为200的圆内。
机械手底座:
X:(150,200)
Y:(250,200)
机械臂1:
机械手运动仿真实验报告.doc下载
久久建筑网m.kkreddy.com提供大量:建筑图纸、施工方案、工程书籍、建筑论文、合同表格、标准规范、CAD图纸等内容。